在读 PyTorch 的文档和源码的时候,发现写文档的人也不怎么解释啥是卷积,卷积的各个参数是什么意思,只在文档里扔了个链接就完事了……
在读 PyTorch 的文档和源码的时候,发现写文档的人也不怎么解释啥是卷积,卷积的各个参数是什么意思,只在文档里扔了个链接就完事了,链接那头是一个 GitHub 上的动图演示仓库,是一篇论文《A guide to convolution arithmetic for deep learning》(链接在文末)的附件。于是这篇文章,基本上就是论文的读书笔记了。
数学的卷积:连续 vs. 离散
定义
连续的情况,两个单变量函数 和 的卷积,定义为:
离散的情况,两个向量(也就是一阶张量) 和 的卷积,定义为:
多变量函数/高阶张量的情况,只需要多加几重积分/求和号就可以类推了。
看这两个定义——
只看等号左边的话,可以把卷积看作是一种特殊的乘法,也就是一种**运算。**f 和 g 的地位是平等的,卷积甚至还满足交换律,你甚至可以把两者的顺序变一变;
但是看等号右边的话,卷积就应该被看作是一种变换。f 和 g 的地位不再平等,f 是被变换的函数/向量,g 是变换的核 (kernel)。函数的情况里,g 把定义在 空间里的函数 f 变换成了 x 空间里的另一个函数;向量的情况里,g 把一个 J (j 所有可能取值的数量) 维向量 f 变换成了一个 I (i 所有可能取值的数量) 维向量。
神经网络中的卷积,借用的主要是第二种理解。
手算一个例子
例如 , ,而且约定下标从 0 开始的话——
不想手算?
import numpy as np
from scipy import signal
signal.convolve(np.array([1,2,3,4]),np.array([1,2,3]))形象化表示
上面的计算过程,可以看作是——
- 把 g 向量的顺序反过来;
- 把 g 的最右一个元素和 f 的最左元素对齐,
- 上下两行都有数字的列相乘(也就是把没有数字的地方看作 0),然后把所有乘积相加,得到 f*g 的第一项;
- 把 g 向右移动一格
- 重复第3、4步
- 直到 g 的最左项移动到 f 的最右一个元素。
形如下列各表:
| --- | --- | --- | --- | --- | --- | --- | | f | | | 1 | 2 | 3 | 4 | | g | 3 | 2 | 1 | | | | | (f*g)(0) = 1 | | | 1 | | | |
| --- | --- | --- | --- | --- | --- | | f | | 1 | 2 | 3 | 4 | | g | 3 | 2 | 1 | | | | (f*g)(1) = 4 | | 2 | 2 | | |
| --- | --- | --- | --- | --- | | f | 1 | 2 | 3 | 4 | | g | 3 | 2 | 1 | | | (f*g)(2) = 10 | 3 | 4 | 3 | |
| --- | --- | --- | --- | --- | | f | 1 | 2 | 3 | 4 | | g | | 3 | 2 | 1 | | (f*g)(3) = 16 | | 6 | 6 | 4 |
| --- | --- | --- | --- | --- | --- | | f | 1 | 2 | 3 | 4 | | | g | | | 3 | 2 | 1 | | (f*g)(4) = 17 | | | 9 | 8 | |
| --- | --- | --- | --- | --- | --- | --- | | f | 1 | 2 | 3 | 4 | | | | g | | | | 3 | 2 | 1 | | (f*g)(5) = 12 | | | | 12 | | |
机器学习的卷积,是卷积吗?
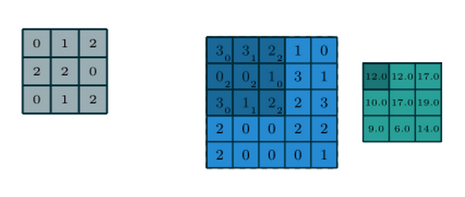
看论文给出的图 Figure 1.1,在卷积核是灰色 3*3 矩阵的情况下,对蓝色 5*5 矩阵的卷积就是直接把核对齐到蓝色矩阵上,并没有把核的元素顺序颠倒过来。
这玩意能叫卷积吗?
有人强行挽尊,说我们画图示的时候已经把核给颠倒过来了,想知道卷积核就把灰色小矩阵再颠倒回去——
但是,不颠倒就对齐相乘的运算也是有名字的,叫 cross correlation。核有没有颠倒,convolution 还是 cross correlation 一组合,可以带来升维打击般的混乱,堪比高中化学的“还原剂被氧化,氧化剂被还原”……所以,对于计算机专业的数学水平,不予置评~
卷积torch.nn.Conv 及其各个参数
in_channels & out_channels
“卷积”的意义在于用一种比较省内存的方式,考虑输入张量中各个元素,和空间上相近的邻居元素之间的关系。所以只需要在真的存在空间关系的维度做卷积,其他维度可以留着不动。
比如一张彩色图片,是一个 (颜色高度宽度) 的 3 阶张量,我们只需要对高度和宽度两个维度做卷积,颜色就是不参与“卷积”的 channel。
in_channel 就是被“卷积”的张量的 channel 数,out_channel 是“卷积”结果的 channel 数。比如我们想从一张 RGB 三色图片中分辨出前景和背景两种不同区域,in_channel=3, out_channel=2。
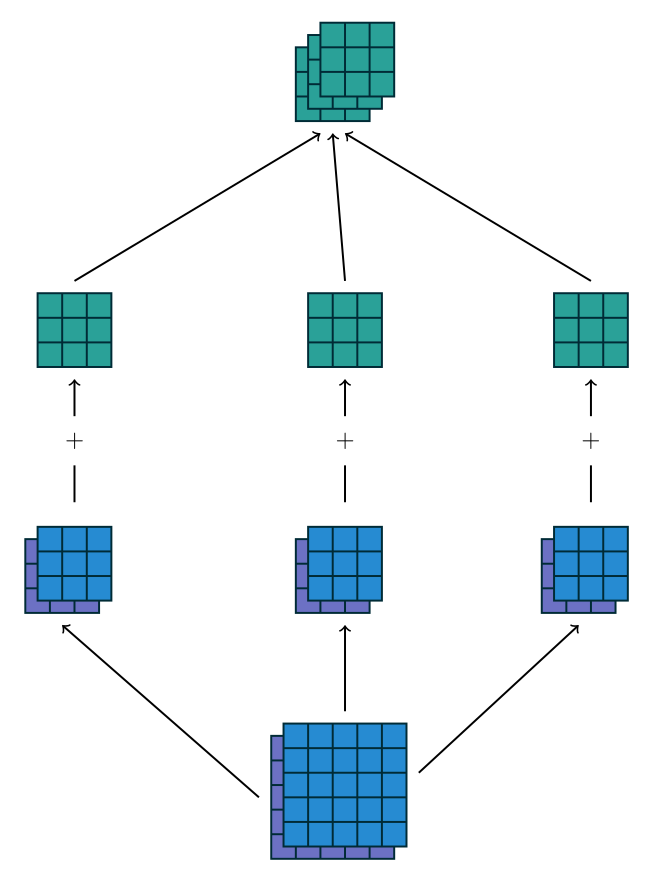
而 in_channel 如何能够与 out_channel 取值不同,原理见 Figure 1.3。我们使用 out_channel 个不含 channel 维度的“卷积”核,每一个核都与每一个 in channel 做卷积,得到图中的蓝、紫色小矩阵,然后直接把不同的 in channel 暴力求和,得到的结果分别作为卷积结果的 out channel。(这个暴力求和与我以前想得不一样,我以为是什么每一元素都做了一个in_channel*out_channel 的全联通层)
PyTorch 的习惯,对于一个 N 阶“卷积”,参与卷积的是张量的最后 N 阶,in_channel 和 out_channel 也就是被卷张量和卷积结果的 Tensor.shape[-(N+1)]
后面图示的例子都没有考虑 in_channel 和 out_channel 的数量,也就是都当作 1 了。
kernel_size
就是灰色矩阵“卷积”核,每边有几个数字。如果不同方向的边长不一,该参数就需要用一个 tuple 来表示。Figure 1.1 的灰色卷积核,kernel_size=(3,3)
padding & padding_mode
前面手算例子的时候很鸡贼地把 0 作为向量下标的起点。如果采用日常 1 开头的下标来算,第 1 项结果为零,整个卷积结果的长度会长很多,而且多出来的后面几项也都是零。
而且在这个过程中,我们实际上是把一个有限长度的向量,看作了一个以所有整数 为定义域的函数,除了那有限的几项之外,其余地方都定义函数值为 0。
用计算机计算的话显然没法如此奢侈地谈“无限多个”,例子中实际用到的,在 左右两边各需要 2 个 0,也就是说 padding=2, padding_mode='zeros'
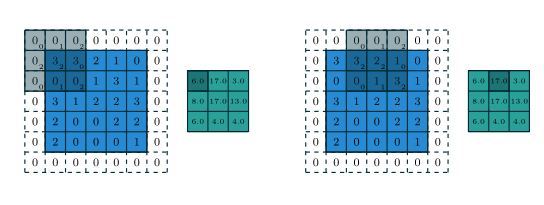
Figure 1.2 表示的就是 padding=(1,1) 的情况(蓝色是被卷张量,白色是 padding,灰色是卷积核,绿色是卷积结果):
既然神经网络中的卷积并不是真正的卷积,所以他们索性不装了——
正常卷积的结果往往比被卷张量大一圈(具体大多少取决于 kernel_size, padding, stride 多个参数),但是图像处理的时候经常希望输出图片和输入图片一样大,此时可以用字符串 “same” 作为 padding 的参数,自动计算 padding 的大小。“strict” 则表示 padding=0, 这样输出图片尺寸会变小,但是没有 padding,也就没有往图片里掺杂研究者对图片边缘以外信息的臆测。
同时 padding_mode 参数表示往被卷张量四周填充的数字也不一定是 0。比如对于图片,0 往往表示纯黑,而绝大多数图片的视野之外,往往是和图片边缘像素值相差不大的值。所以 padding_mode 除了 zeros 之外,还接受以下取值:
reflect: 以图片边缘为镜面,把边缘附近的像素值对陈反射出去;replicate: 只取边缘的像素值作为常数,直接向外延拓;circular: 类似于物理中的周期性边界条件,取对边附近的像素值作为 padding 内容。
stride
前面手算卷积的第4步,把卷积核向右移动了1格,如果每次移动超过1格,就需要这个参数指定移动步长。如果不同方向的步长不同,也是用 tuple 来表示。
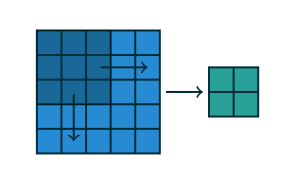
Figure 1.4 表示的就是 stride=(2,2) 的情况(蓝色是被卷张量,蓝色中的深色块是卷积核,绿色是卷积结果):
dilation
这个参数把“卷积”核撑开,也就相当于在“卷积”核的相邻元素之间加 0。Figure 1.5 表示的就是 dilation=(1,1) 的情况(蓝色是被卷张量,蓝色中的深色块是卷积核,绿色是卷积结果):
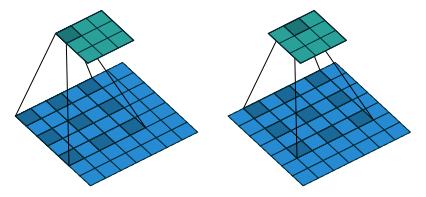
比如 dilation=1 时,(1,2,3) 的卷积核就相当于 (1,0,2,0,3)
比如 dilation=2 时,(1,2,3) 的卷积核就相当于 (1,0,0,2,0,0,3)
这样可以让卷积核在尺寸比较小的情况下,覆盖到更大面积的被卷张量。当然具体实现时,不可能直接补 0 这么浪费内存。
groups
该参数必须是 in_channel 和 out_channel 的公约数,当其不为 1 时,就相当于同时做 groups 个卷积,其中每个卷积的 in_channel=in_channel/groups, out_channel=out_channel/groups
bias
该参数是一个布尔值,卷积类似于一种高维空间里的乘法,这个参数就决定是否要拟合 y=kx+b 中的 b
“卷积”的“逆运算”: TransposeConv
卷积的结果比 padding 之后的被卷张量要小。尤其当“卷积”的 stride 约等于 kernel_size 时,卷积的就变成了某些池化 (pooling)(求最大值不是一种线性算子,所以最大值池化不能用卷积表示,但是平均值池化可以)。
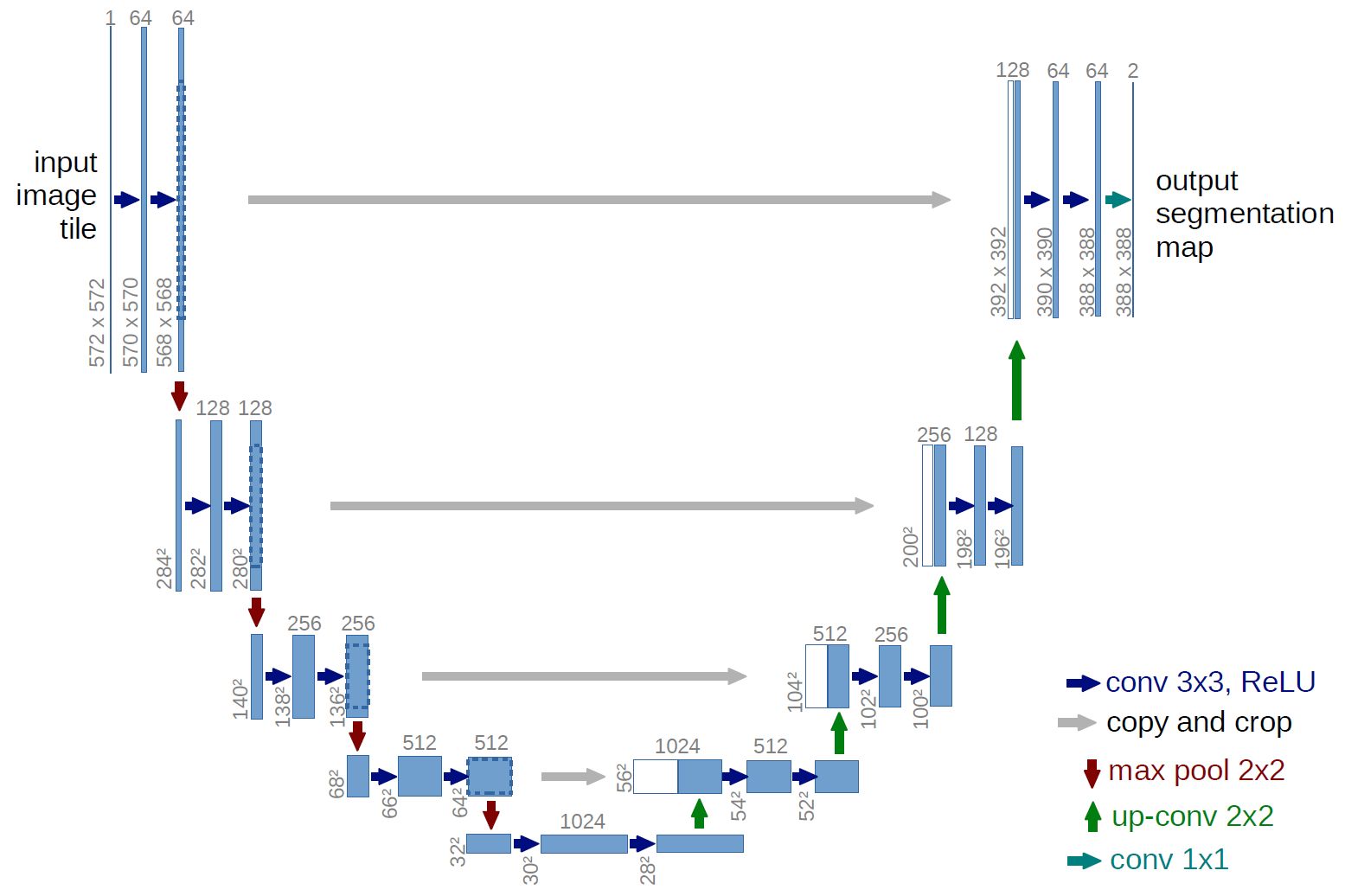
那么在类似 U-net 这样的模型里,右半边的数据升维(下图中的绿箭头),就需要一种“卷积”的“逆运算”。有人把这种运算叫做 deconvolution,有人叫做 transposed convolution,还有人叫做 convolution with fractional strides。
PyTorch 取的是第二种名字。论文解释了为什么这么取名字,笔记以后有时间再补上把……
因为这个与运算本身就是作为“卷积”的逆运算出现的,所以 PyTorch 的文档里这么说:
This is set so that when a
Conv2dand aConvTranspose2dare initialized with same parameters, they are inverses of each other in regard to the input and output shapes.
也就是说,把 ConvTranspose 的输入和输出反过来,然后按照 Conv 的规则确定各个参数,填入 ConvTranspose 的括号里就可以了,除了 output_padding
output_padding
ConvTranspose 的输出就是对应 Conv 的输入。看 Figure 2.7:
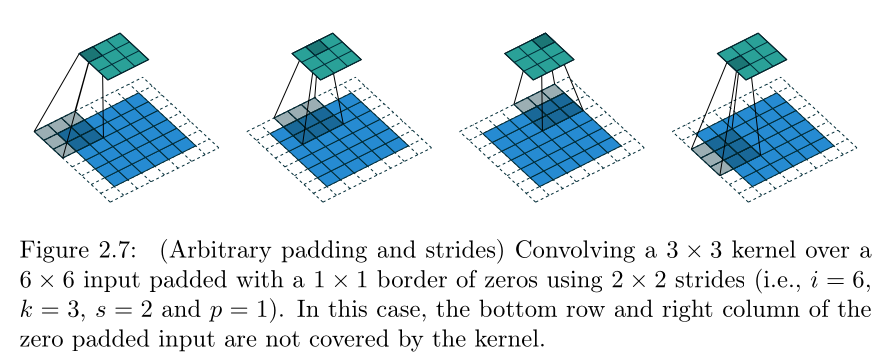
当 不能整除的时候,最右的几列最下的几行就被卷积核忽略掉了。那么在逆运算 TransposeConv 中,这就意味着同一个输入可能对应着 种可能的输出。output_padding参数就可以消除这种歧义,调整 TransposeConv 输出张量的尺寸。
参考链接
- 给卷积正名: https://www.kaggle.com/general/225375
- PyTorch Conv2d 源码: https://pytorch.org/docs/stable/_modules/torch/nn/modules/conv.html#_ConvNd
- 论文: https://arxiv.org/abs/1603.07285
- 动图演示: https://github.com/vdumoulin/conv_arithmetic/blob/master/README.md
- U-net: https://lmb.informatik.uni-freiburg.de/people/ronneber/u-net/
- PyTorch TransposeConv 文档: https://pytorch.org/docs/stable/generated/torch.nn.ConvTranspose2d.html
本文收录于以下合集: