Because high-dimensional space is difficult to understand intuitively (von Neumann and his sister: we don’t), high-dimensional dynamics generally discusses linear systems first, and then regards the effects of nonlinearity as distortions of linear systems.
A linear dynamical system in n dimensions, written in matrix multiplication form:
This system of ordinary differential equations can be solved directly.
General solution of linear differential equations
is generally a real matrix. Let and be the eigenvalues and eigenvectors of the matrix .
When the eigenvalues are not equal to each other
Where is a constant determined by the initial value condition, and the eigenvectors are not necessarily** orthogonal.
Among them, an eigenvalue may be positive, negative, complex, 0, or coincide with other eigenvalues. After a long enough evolution——
- Positive number: Each component of diverges to infinity along the direction;
- Negative number: Each component of converges to the origin along the direction;
- 0: Each component of does not change in the direction, and the straight line through the origin represented by becomes the "stationary line" of the system
- Complex number: and its conjugate are both eigenvalues of , and each variable spirals between this pair of eigenvectors according to Euler's formula. If the real part is positive, it spirals to infinity, and if it is negative, it spirals to the origin;
- Equal to other eigenvalues, let the multiplicity of this eigenvalue be k, then the solution of the equation becomes
When the eigenvalues are not zero, the linear system has at most one stationary point, which is the origin.
Example: 2D Linear System
In 2D, the eigenvalues of the matrix are given by the matrix trace and the determinant
The phase portrait of the system--
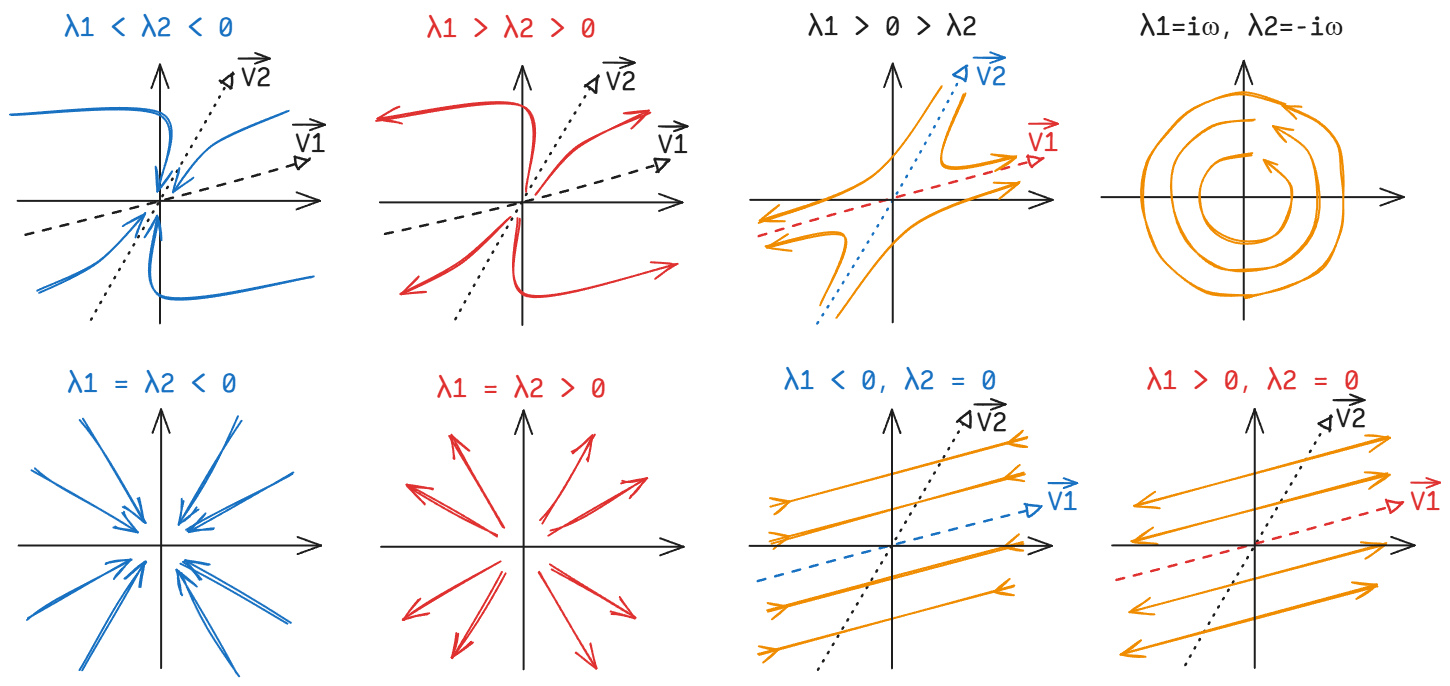
At an infinite distance from the origin, the tangent of the dynamic trajectory approaches the eigenvector with the larger absolute value of the eigenvalue.
It can be seen that in addition to stable and unstable stationary points (4 figures on the left), two-dimensional systems have several more cases than one-dimensional systems (4 figures on the right).
-
The stationary point when one eigenvalue is positive and the other is negative is called a saddle point.
-
When one of the eigenvalues is 0, the straight line through the origin represented by the corresponding eigenvector is the fixed line of the system.
-
When the two pairs of eigenvalues are conjugate complex numbers, the system will have periodic phenomena, but the limit cycle will not appear until the nonlinear system.
Nullcline
There is only one f function in a one-dimensional system, and solving the stationary point only requires calculating the zero point of this function.
In high-dimensional dynamics, the zero point of in each dimension can be found, and the solution is an n-1-dimensional geometric structure called nullcline. In a two-dimensional dynamic system, nullclines are one-dimensional structures, that is, straight lines/curves.
On the nullcline of the kth dimension, the rate of change of the variable is 0, and the tangent of the trajectory of the generalized coordinates in the phase space is orthogonal to the number axis of .
The stationary point is the common intersection of all n nullclines.
Jacobian Matrix
For a linear system represented in matrix form, the i-th row and j-th column of is exactly . This partial derivative matrix between two vectors is called the Jacobian matrix .
The Jacobian matrix of a linear system has elements that are constants independent of .
The Jacobian matrix of a nonlinear system generally has elements that are expressions with as variables.
The Jacobian matrix is used to discuss the stability of stationary points/attractors, and its role in nonlinear systems will become more obvious in the next post.
What's next
Qualitative and semi-quantitative analysis framework for nonlinear systems
See also: