分叉是动力学相变的最主要表现,是一种定性现象
上篇的配图不够潦草,这篇舒服了
还有人记得“多图杀猫”是什么意思吗 2333
分叉 (bifurcation) 是动力学相变的最主要表现,是随着参数定量变化的驻点、极限环、吸引子等结构的数量和种类变化。
分岔是一种定性现象——虽然 Steven H. Strogatz 的《Nonlinear Dynamics and Chaos》中为了方便讨论,每个例子给出了具体的动力学表达式,但是形状类似的非线性函数都会出现该种分叉现象。
动力学用相图 (phase diagram) 表示参数空间内不同的相,以及各个相之间的临界点/临界面。
当参数只有 1 个维度时,空出来的纵坐标可以表示出各个相的具体动力学特征,也就是驻点的数量和取值,此时的图像也叫分岔图 (bifurcation diagram)。
下面列举不同种类的分岔,并结合图示介绍他们的特点。
驻点相关的分岔 (Bifurcation of Fixed Points)
鞍结分岔 (saddle node bifurcation)
这种分岔的别名众多:
- 折叠分岔 fold bifurcation
- 转折点分岔 turning-point bifurcation
- 晴天(霹雳)分岔 (out-of-the-)blue-sky bifurcation
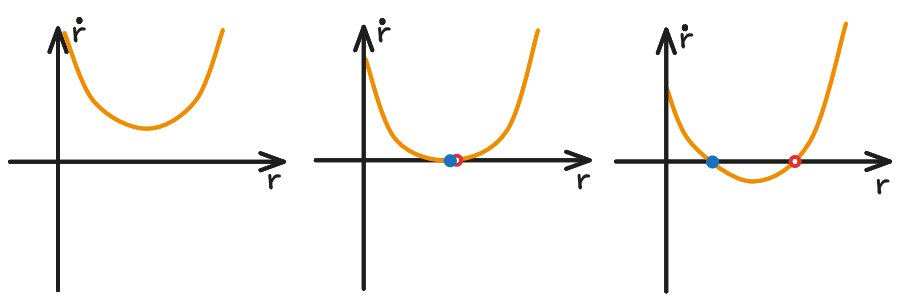
当动力学函数是如图所示的正 U/倒 U 形,而参数 r 可以调整函数曲线和 x 轴的高低关系时——

会有一对稳定性相反的驻点互相靠近对方,接触后湮灭,然后驻点消失。
也可以反方向理解,原本没有驻点的动力学空间里,晴天霹雳般产生出一对稳定性相反的驻点。
一维空间里不太容易看出来这种分岔为什么要叫鞍结。在二维动力学系统中,如果另一个维度是一个平凡的稳定驻点,那么上面的不稳定驻点就成为鞍点,整个系统的势能函数就像一个马鞍加半边马镫。
跨临界分岔 (transcritical bifurcation)
当 U 形动力学函数中的一个驻点位置固定,参数 r 控制另一个驻点在横轴上滑动时——
分岔图:
草叉分岔 (pitchfork bifurcation)
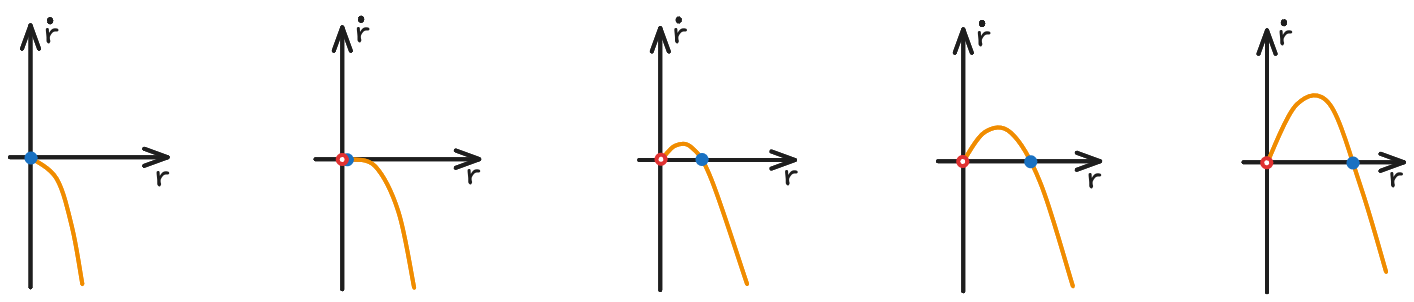
当动力学函数像三次多项式一样在两个单边行情中间夹杂一个回调/反弹,而参数 r 调控回调/反弹幅度时,函数与 x 轴少则一个交点,多则能有 3 个交点。
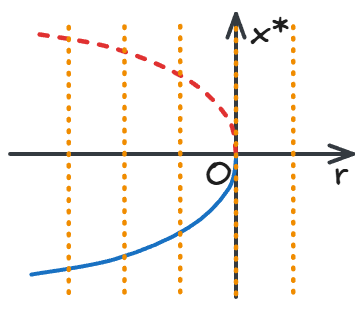
超临界 (supercritical) 草叉分岔
当两边的长臂都递减时——

如果动力学函数和横轴只有 1 个交点,那么这个驻点是稳定的;
如果动力学函数和横轴开始出现 3 个交点,原先的那个驻点从稳定变成不稳定,并在两侧各自产生一个稳定驻点。
相图长得像干农活用的草叉,故而得名。
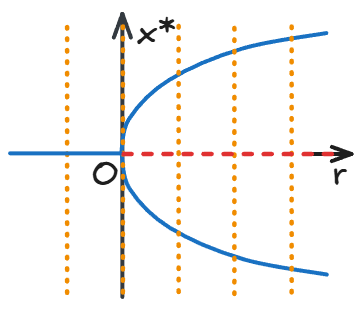
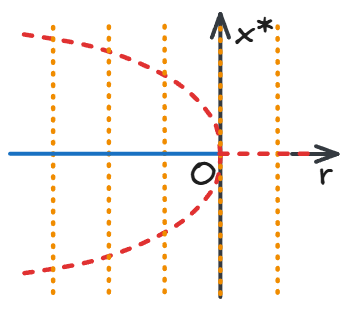
次临界 (subcritical) 草叉分岔
反过来,当两边的长臂都递增时——
如果动力学函数和横轴一开始有 3 个交点,则中间的驻点是稳定的,两侧各有一个不稳定驻点;
当中间的下降段不断缩小,动力学函数和横轴只剩 1 个交点时,原先两侧的驻点消失,中间的稳定驻点变得不稳定。

此时整个空间中不存在稳定驻点,原先稳定在原点的动力学轨迹会突然趋向于无穷。在各种分岔中,次临界 (subcritical) 往往都意味着动力学系统的行为比较激烈。
极限环相关的分岔 (Bifurcation of Cycles)
与极限环相关的分岔有两类:
- Hopf 分岔:螺旋驻点的稳定性变化、极限环的产生/湮灭
- 全局分岔:极坐标中的分岔在直角坐标系中的表现
Hopf 分岔
从螺旋驻点变成极限环有两种理解方式:直角坐标系和极坐标系。
直角坐标系里,本系列第 2 篇说过,高维的动力学系统,驻点的稳定性要通过雅各比 (Jacobian) 矩阵 的本征值分析来判断。对于二维雅各比矩阵,本征值为
当 时,本征值是一对共轭复数,驻点附近的动力学轨迹会绕着驻点螺旋,方向由 确定。当参数可以调控 时,就可以改变螺旋的方向。
如果整个系统在无穷远的表现和驻点附近的螺旋不同,可以推测在驻点以外某处形成了新的极限环。
以上分析方式只涉及驻点的变化,所以称 Hopf 分岔是一种局域 (local) 现象,后面的几种分岔是全局 (global) 现象。
在极坐标系里,当角向的动力学比较平凡,而径向发生了草叉 (pitchfork) 分岔时,所有 r > 0 处新出现的驻点,转换回直角坐标系后就是极限环。
既然 Hopf 和草叉分岔有渊源,那么它就也分为超临界和次临界——
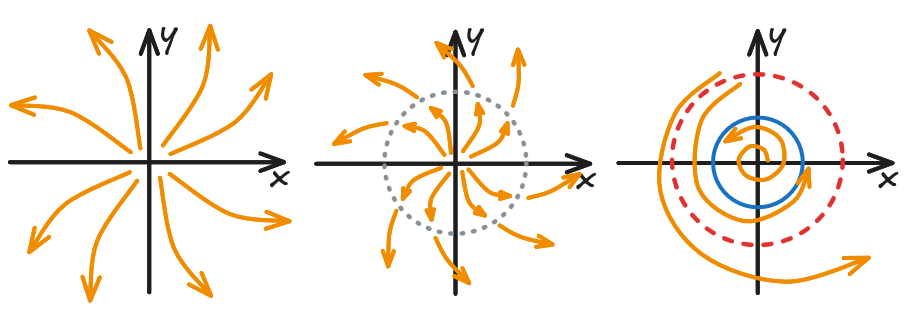
超临界 (supercritical) Hopf 分岔
极坐标的径向发生了超临界草叉分岔,原点原本是一个稳定螺旋,跨过临界点后变成不稳定螺旋,同时在远离原点的有限距离处产生一个稳定极限环。
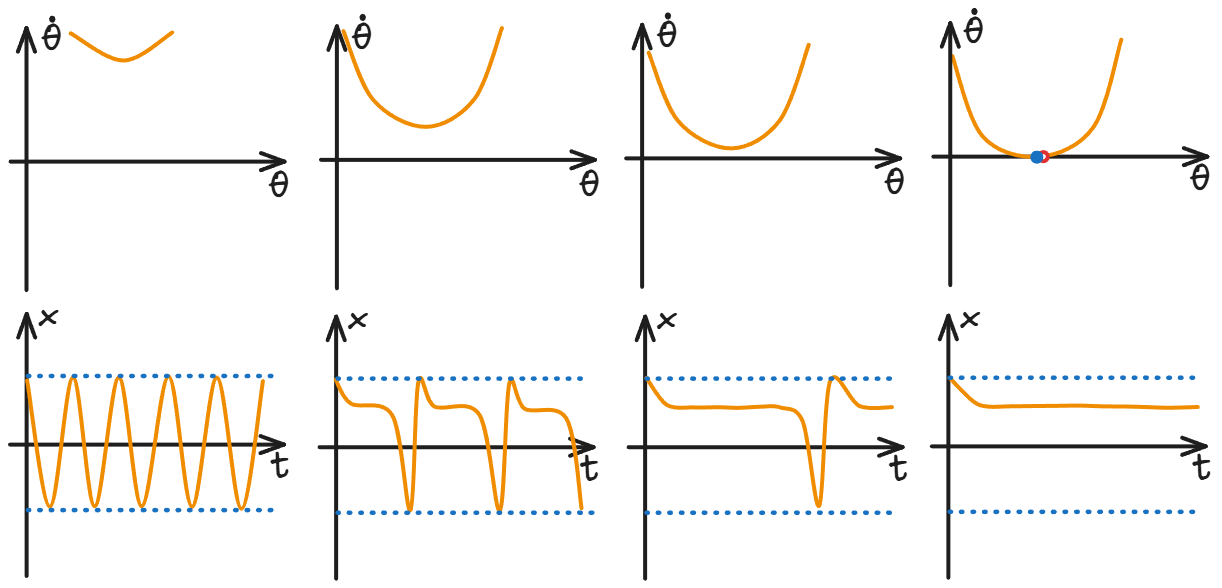
不论是哪一个相,整个空间中任意位置的初值条件,最终都会收敛到某个有限范围内的吸引子,动力学变量要么在阻尼振动下衰减,要么振幅扩大到某个值之后稳定:

既然稳定驻点可以看作半径为 0 的极限环,那么超临界系统里极限环的半径随参数变化是连续的,这也是书上说超临界系统的行为比较“温和”的原因。
次临界 (subcritical) Hopf 分岔
Hopf 分岔中的次临界也比超临界行为更激烈。

在不稳定极限环存在的时候,原点是个稳定驻点,极限环以内的轨迹向原点收敛;
当极限环收缩成不稳定驻点之后,原点附近的轨迹会突然向无穷远处发散。参数的作用像是个“全有或全无”的开关。

简并 (degenerate) Hopf 分岔
比起草叉分岔,Hopf 还多一种简并分岔。
当 时,驻点周围的轨迹会变成闭合的环路,而不是螺旋。
全局分岔·鞍结 (saddle node bifurcation of cycles)
在极坐标系中,角向的动力学平凡,径向发生前面所说的鞍结分岔时,系统在直角坐标系下就出现鞍结分岔。
到原点一定距离的地方出现/湮灭一对稳定性相反的极限环。
临界点附近,因为上一篇提到的临界减速现象,轨迹运行到即将出现极限环的地方速度会变慢。在临界点上,不考虑误差的话,极限环内侧的轨迹在有限时间内都没有足够的速度跨过极限环。
全局分岔·无限周期 (infinite-period bifurcation)
在极坐标系中,径向存在一个非 0 的稳定驻点,也就是直角坐标系中的极限环。角向发生鞍结分岔时,极限环上凭空出现一对稳定驻点和鞍点。
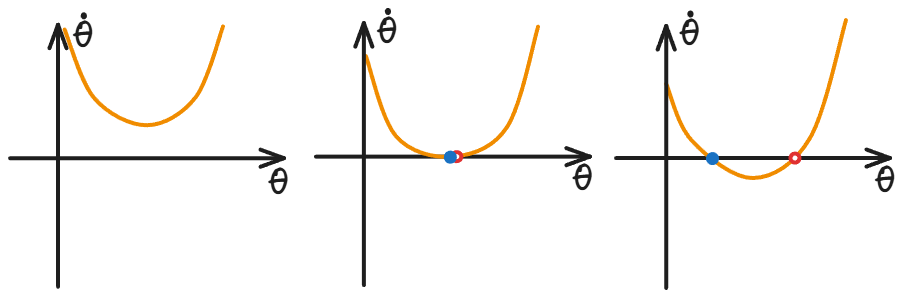
直角坐标系中,动力学轨迹从绕着稳定极限环周期性转圈,变成一对“鞍点-稳定驻点”主导的 landscape。
之所以叫做无限周期分岔,是因为当角向动力学函数还没有出现驻点,但是向临界点取极限时,因为上一篇提到的临界减速现象,动力学轨迹的角速度会变得非常慢,绕极限环一周所需的时间趋近于无穷。
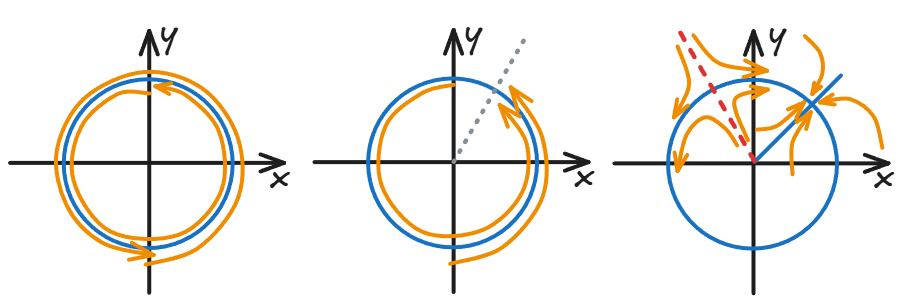
全局分岔·鞍环/同宿分岔 (saddle loop/homoclinic bifurcation)
可以看作一种特殊的无限周期分岔。
系统里的极限环和鞍点原本相距一定距离,相变过程中相向而行,临界点时鞍点和极限环相接触,再后来极限环消失,只剩一个鞍点和一个不稳定螺旋。
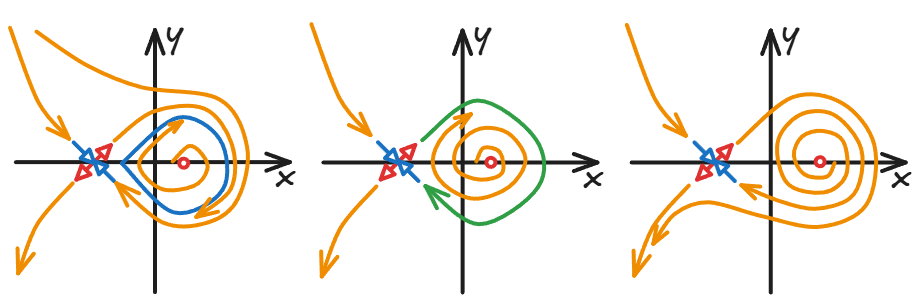
在临界点上,从鞍点的不稳定方向出发的轨迹,会绕着极限环绕回到鞍点的稳定方向。(绿线)这种动力学轨道叫做 homoclinic 轨道。
找了很多地方都没找到 homoclinic 这个词的翻译,维基百科词条没有中文版,日文版直接用假名注音,“同宿”是 Google 翻译的结果。
本文收录于以下合集: