A tentative English translation, not rigorously proof-read yet.
n 维的线性动力学系统,写成矩阵乘法形式:
z˙1z˙2⋮z˙n=dtdz1z2⋮zn=J11J21⋮Jn1J12J22⋮Jn2……⋱…J1nJ2n⋮Jnnz1z2⋮zn
这个常微分方程组 dz/dt=J^⋅z 可以直接求解.
线性微分方程通解
J^ 一般是一个实矩阵,令 λi 和 vi 是矩阵 J^ 的本征值和本征向量,
在各个本征值互不相等的情况下
z=i∑ncieλitvi=c1eλ1tv1+c2eλ2tv2+⋯+cneλntvn
其中 ci 是初值条件确定的常数,各本征向量 vi 之间不一定正交。
其中某一本征值 λi 可能是正数、负数、复数、0、与其他本征值重合。经过足够长时间的演化——
- 正数:z 各分量沿 vi 方向发散到无穷;
- 负数:z 各分量量沿 vi 方向收敛到原点;
- 0:z 各分量在 vi 方向上没有变化,vi 表示的过原点的直线成为系统的“驻线”
- 复数:λ 及其共轭 λ∗ 都是 J^ 的本征值,各变量在这对本征向量之间根据欧拉公式螺旋,实部为正则往无穷远处螺旋,为负则往原点螺旋;
- 与其他本征值相等,令该本征值的重数为 k,则方程的解变为 z=∑in−kcieλitvi+∑jkdjtj−1v
当各本征值不为零时,线性系统最多只有一个驻点,也就是原点。
以二维线性系统为例
在 2 维时, J^ 矩阵的本征值由矩阵的迹 Tr[J^] 和行列式 Det[J^] 给出
λ±=2Tr[J^]±Tr2[J^]−4 Det[J^]
系统的相图——
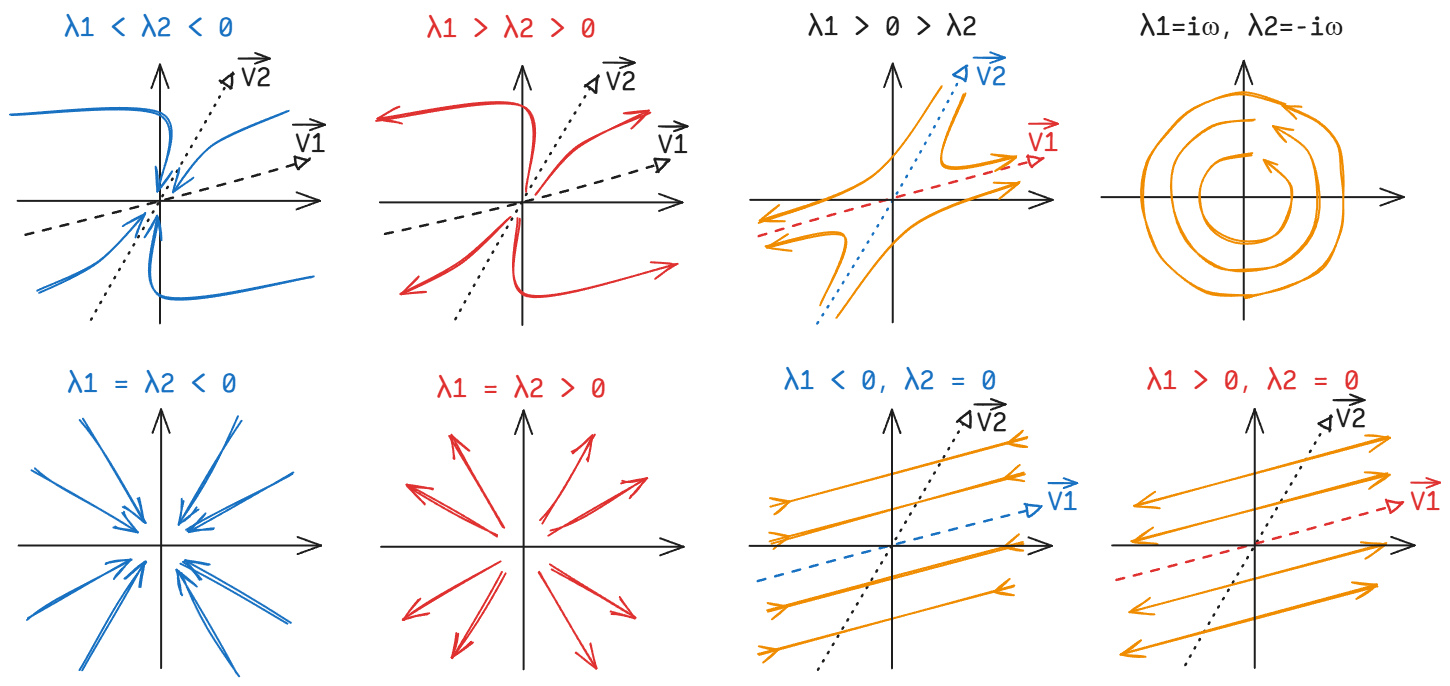
距离原点无限远处,动力学轨迹的切线趋近于本征值的绝对值较大的那个本征向量。
可以看到除了稳定和不稳定驻点(左侧 4 图),二维系统比一维多出好几种情况(右侧 4 图)。
- 两个本征值一正一负时的驻点叫做鞍点 (saddle point)。
- 其中一个本征值为 0 时, 对应的本征向量表示的过原点直线是系统的驻线 (fixed line)
- 两对本征值为共轭复数时,系统会有周期现象,但要到非线性系统中才会出现极限环 (limit cycle)
零斜率线
一维系统只有一个 f 函数,求解驻点也就只需要算这一个函数的零点。
高维动力学中,每一个维度的 fi 都可以求零点,解是一个 n-1 维的几何结构,名为 nullcline。在二维动力学系统中,nullclines 是一维结构,也就是直线/曲线。
在第 k 个维度的 nullcline 上,变量 zk 的变化率为 0,相空间中广义坐标的轨迹的切线和 zk 的数轴正交。
而驻点就是所有 n 个 nullclines 共同的交点。
雅各比矩阵
矩阵形式表示的线性系统,J^ 的第 i 行第 j 列正好是 ∂z˙i/∂zj=∂fi/∂zj,这种两个向量之间的偏导数矩阵,叫做雅各比 (Jacobian) 矩阵 J。
线性系统的雅各比矩阵,各元素是与 zi 无关的常数。
非线性系统的雅各比矩阵,各元素一般是以 zi 为变量的表达式。
雅各比矩阵被用来讨论驻点/吸引子的稳定性,在下一章非线性系统中的作用更加明显。
下集预告
非线性系统的定性和半定量分析框架