非线性动力学系统和线性系统的不同;半定量分析流程;吸引子
A tentative English translation, not rigorously proof-read yet.
上回书说了线性系统 ,引入了两个当时看起来没什么意思的概念:
- 零斜率线 (nullcline):驻点是所有维度的零斜率线的交点;
- 雅各比 (Jacobian) 矩阵:高维相空间中广义速度的广义“斜率”。
现在来考虑非线性 ,它对线性系统扭曲的直观效果包括:
- 零斜率线(如果存在)不再一定是直线
- 驻点的数量不再最多只有一个;
- 驻点的位置(如果存在)不再固定位于坐标原点。
- 雅各比矩阵的各项不再是与 z 无关的常数
- 驻点的稳定性需要根据各个驻点 z* 的值分别讨论。
半定量分析流程
- 零斜率线
- 计算 并画出各个维度的零斜率线 nullcline;
- 沿着每个维度的零斜率线 nullcline,画出广义速度的大小和方向,第 k 个维度的 nullcline 上的广义速度为
- 驻点
- 将所有维度的零斜率线 nullcline 的交点标记为驻点
- 计算驻点处的雅各比矩阵,类比线性系统,判断驻点的类型
- 动力学轨迹
- 根据驻点类型,也根据零斜率线 nullcline 上的广义速度,插值画出其他位置上的广义速度
- 将首尾相接的广义速度连缀成动力学轨迹
举个例子:没有小角近似的硬轻棍摆
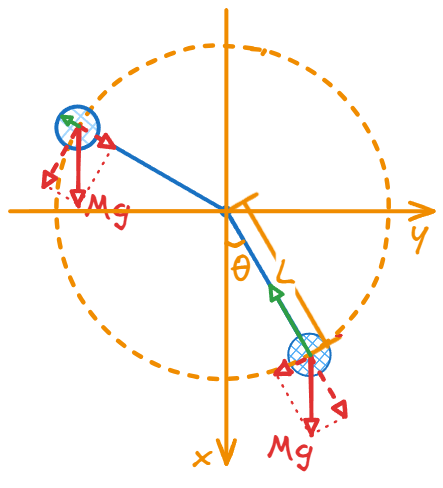
如题也如图所示,“硬”的意思是棍可以在伸缩两个方向上对小球施力,且棍的长度不变;“轻”的意思是摆的全部质量位于小球上;“小”的意思是球可以看作质点;总之,能抬杠的地方基本上都堵死了~
图中有 2 个空间维度,1 个硬棍长度的约束,所以只有 1 个空间自由度。我们取自由变量为棍与重力方向的夹角 。
如本系列第 0 篇所说,牛顿第二定律是一个二阶微分方程,所以还需要一个中间变量,角速度 。
切向加速度只由重力的切向分量提供,所以
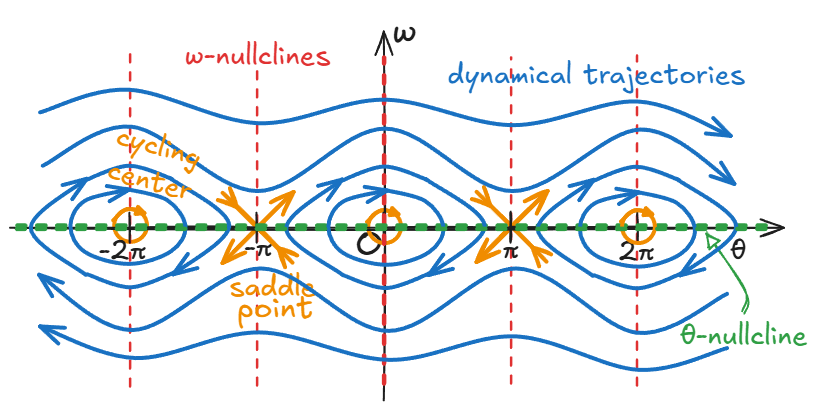
相空间是
维度的零斜率线就是 轴, 维度的零斜率线是 的直线族
系统的驻点是
雅各比矩阵是
n 为偶数时的驻点,雅各比矩阵的本征值是 ,动力学轨迹绕这些驻点闭环;
n 为奇数时的驻点,雅各比矩阵的本征值是 ,这些驻点是鞍点。
经过亿点插值,画出的相图:
本系列第 1 篇说过,完成从位形空间到相空间的思维转变之后,不应该自满于“嘿嘿我说的话老百姓听不懂啦”的优越感,而要逆练神功,把相空间描述的物理在大脑中渲染回位形空间和时间——
可以看到,系统在 方向具有平移对称性,可以卷成一个底面周长为 的竖直圆筒,对应于角度的同余等价类。
又可以看到,系统的动力学轨迹可以分为两类:
- 夹在鞍点和循环中心之间的,闭合环路:对应于机械能不足以到达最高点就落回去的往复摆动;
- 远离鞍点和循环中心的,无限延展曲线:对应于机械能足以冲过最高点之后继续向前的转动。
还可以看到,距离 轴越远的动力学轨迹, 方向上的涨落越小。这是因为同一轨迹上所有点的机械能相等,对于同一个摆,重力势能取决于 且有界,动能取决于 。 绝对值越大的地方,重力势能占机械能的比例越小,其变化对机械能守恒所要求的动能(角速度)变化也就越不明显。
驻点 → 吸引子 (attractor) / 排斥子 (repeller)
随着维度的升高,驻点的存在,也就是“所有维度的零斜率线相交于某点”这一要求越来越难满足。与此同时,有的时候不需要这么严格的条件,系统也会出现相对稳定的行为。
所以稳定驻点的概念,被放松成了吸引子,也就是相空间中满足下面三条的子集:
- 不变 (invariant):初值位于吸引子内的系统,其之后时段的轨迹也都位于该吸引子内。
- 吸引 (attractive):初值位于吸引子外的系统,经过时间的演化会被吸引到附近。
- 极小 (minimal):吸引子内部,不存在满足前两条的子集。
前面讲过的线性系统的驻线,如果是稳定的,就符合吸引子的定义。
同样类比于驻点,与之相反的相空间结构叫做排斥子。
极限环 (limit cycle)
稳定极限环是吸引子中的一种,不稳定极限环是排斥子中的一种。
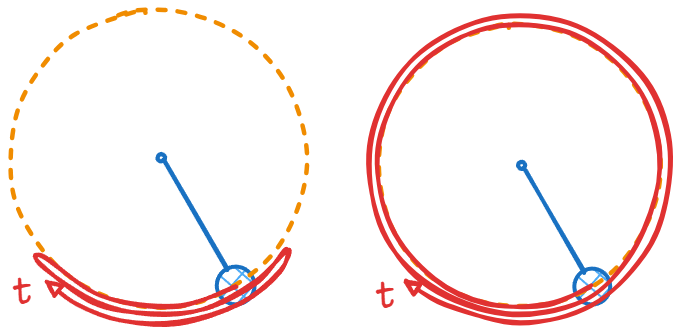
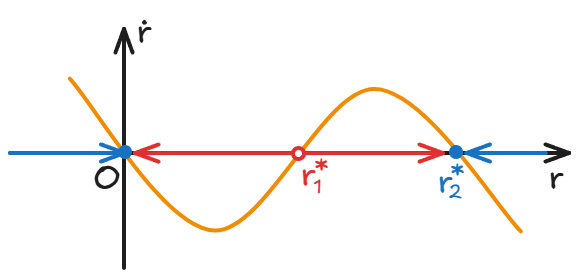
我们当初上课时候的例子是一个极坐标中的动力学系统:
角速度在离原点越远的地方越大,没什么意思;
半径方面有两个稳定驻点,一个不稳定驻点:
而当我们用笛卡尔坐标来表示这个系统的时候:
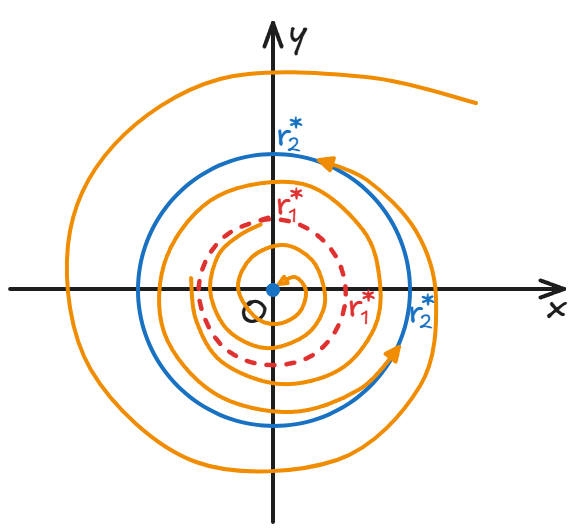
以 为半径的圆就满足我们上面吸引子的定义。初值半径大于 的轨迹经过足够长的时间,会趋向于绕着蓝色的圆做圆周运动。
以 为半径的圆就满足我们上面排斥子的定义。初值半径小于 的轨迹经过足够长的时间,会趋向于螺旋远离红色的圆。
这两个圆都是极限环 (limit cycle)。
下集预告
本文收录于以下合集: